RTK(Real Time Kinematic GPS)とは
RTK-GPSとはReal Time Kinemmatic GPS(リアルタイムキネマティックGPS)の略称で、近年注目を浴びている高精度な位置の測位方法を指します。
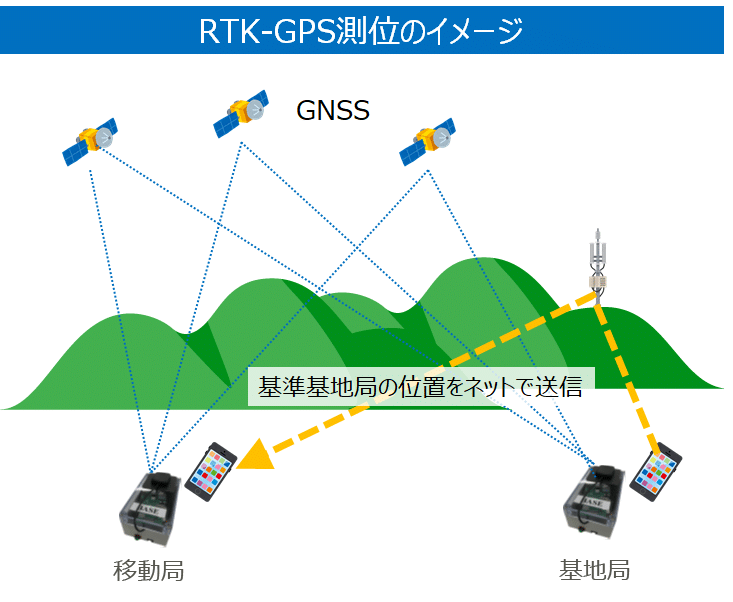
RTK-GPSでの測位を実現する為には通常のスマートフォンの様にGPS衛星からの信号だけでなく、別途、基準局と呼ばれる位置を固定した観測点の基地局(以降、基準基地局)が必要となります。
RTK-GPS測位は、基準基地局と位置を求めようとする移動観測局で同時にGPS測位を行い、基準基地局で観測したデータを無線等を用いて移動観測局側へリアルタイムに送信し、基準基地局の位置成果に基づき移動観測局の位置をリアルタイムに求めることができます。RTK-GPSでは、両基地局で位相の測定を行い基準基地局で観測した位相データを移動観測局に送信し、受信データと基準基地局から送信されたデータをリアルタイムで解析することにより、移動基地局の位置を決定します。
これにより、各種の誤差要因が消去される事から通常のGPSでは2~10mほどの誤差が出てくるのに対し、RTK-GPSではcmオーダーでの位置測位を実現します。
RTK_GPS
ネットワーク型RTK-GPSの登場
一般的に測位精度を出すには基準基地局から半径10km以内にする必要があるといわれております。
特定の地域を対象とした場合には独自の基準基地局を立てたり、公開されている基準基地局(善意の基準局掲示板等 http://rtk.silentsystem.jp/)を活用する事で対応可能ですが、移動体や測位するポイントが変わる場合にはなかなか切り替える事が出来ませんでした。
しかしながら、2019年から通信事業者様より、RTK-GPSをネットワーク回線を活かした形のサービスも出てきております。
お手軽に始めるのであれば、そういった手段もアリかもしれません。
■ docomo IoT高精度GNSS位置情報サービス
https://www.nttdocomo.co.jp/biz/service/highprecision_gnss_positioning/
■SoftBank 位置測位サービス「ichimill」
https://www.softbank.jp/biz/iot/service/ichimill/
RTK-GPSで期待される業界
もっとも期待されている事としてRTK-GPSの高精度位置測位と遅延の少ない5Gネットワークを組合わせた、機械の自動化が想定されています。
具体的には…
 |
■農業分野ロボットトラクターを自動制御する事で人手不足が深刻な農業分野において耕作の自動化や繁忙期における24時間体制での稼働が期待されております。 |
 |
■土木分野専門知識と危険を伴う作業の土木分野での自動化も期待されております。
|
 |
■配送分野人手不足が深刻な配送分野においても自動化が期待されております。長距離での輸送業務ではトラックの自動化や人手のかかる宅配分野においてははドローンを活用した配送システムなど様々な実証実験が行われております。 |
 |
■公共交通分野人手不足が叫ばれる地方でのバスや高齢化に伴う代替移動手段の提供として交通機関の自動化が期待されております。
|
上記の様な分野を中心にしながら、高精度な位置情報を活用したサービスが続々と出てくると思われます。
MbaseのRTK測位に対応した基地局の試作機
当社もRTK-GPSについてはいち早く興味をもって取り組んでまいりました。
当社の強みである
・位置情報システムの開発
・クラウドを活用したサービスの構築
・組込み技術を活用したハードの開発
上記の様な技術を組合せ、どこでも基準基地局を設置できるPoCを開発・実用性の検証を実施しております。

基準局と移動局
■サービス構成要素
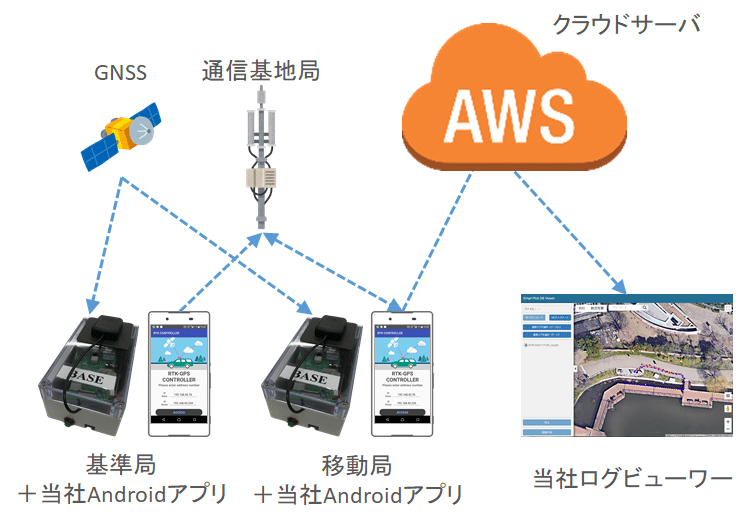
RTK_構成図
■基地局を構成する要素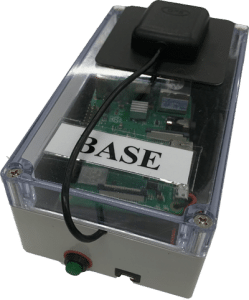
| GNSSアンテナ | ublox NEO-M8P |
| GNSS制御プログラム | RTKLIB |
| ベースボード | Raspberry Pi 3B |
| 電源 | 市販モバイルバッテリー |
| 統合制御プログラム | 当社制作プログラム |
■基準局情報送信 兼 基地局コントロールアプリ

RTK_コントロールアプリ

モード切替画面
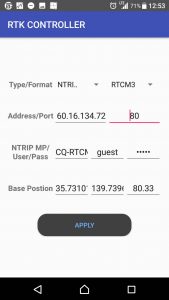
RTK_基地局設定画面
■ログビューワー(スマートフォン対応)
log_viewer
試作基地局での精度試験結果
実際に試作した基準基地局をセットし、移動局を利用使って精度検証を実施しました。
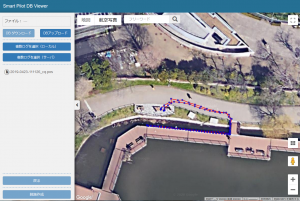
試験方法は測位を開始した移動局を一定の高さに保持しながら、地面の境界線を頼りに移動する。という物です

検証方法
■ 検証結果

通常の位置測位
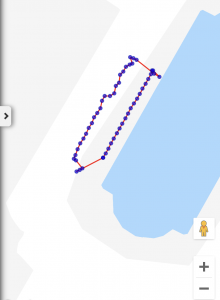
RTKを利用した位置測位